二维码

工博士官方客服微信
联系方式
联系方式
电话:18964551752
服务时间 8:30~18:00
返回首页
回到顶部
ABB机器人示教器入门-初级教学|干货
2017-12-20 20:44:49
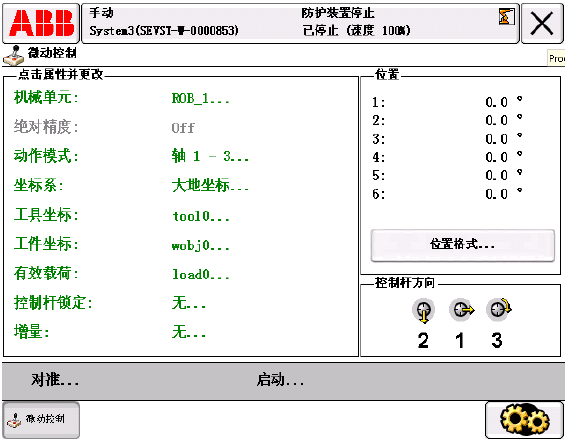
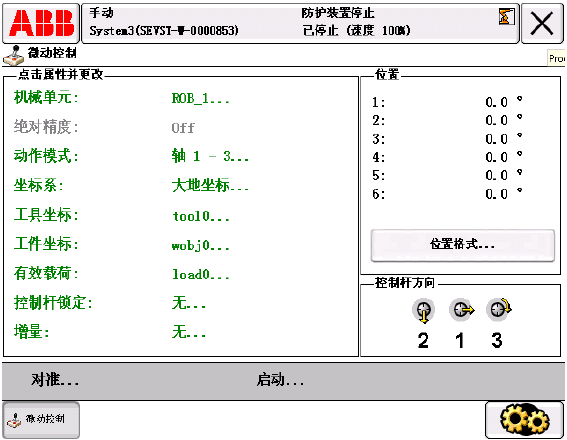
手动操作窗口示意图:
步骤1、将机器人操作模式选择器置于手动限速模式。
步骤2、在ABB菜单中,单击手动操纵打开手动操纵窗口。
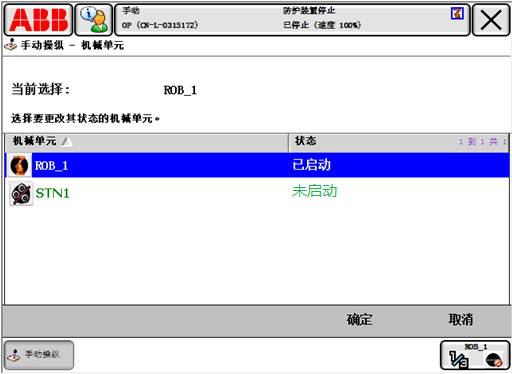
机械单元:
步骤1、打开手动操纵窗口,并点击机械单元。
步骤2、在弹出的窗口中选择需要进行控制的机械单元,然后点击确定。
运动模式:
步骤1、打开手动操纵窗口,并点击动作模式。
步骤2、在弹出的窗口中选择所需模式,然后点击确定。
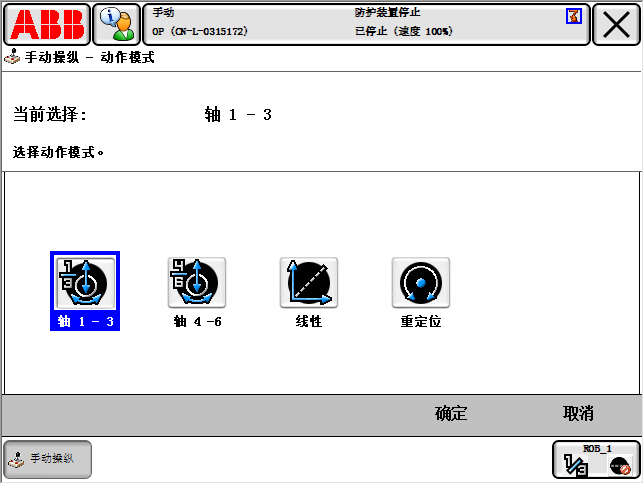
单轴运动
Axis 1-3 轴 1-3

机器人一、二、三每个转轴单独转动。

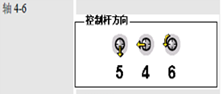
Axis 4-6 轴 4-6

机器人四、五、六每个转轴单独转动。
单轴运动何时使用比较好呢?
(1)将机械单元移出危险位置;
(2)将机器人移出奇点;
(3)定位机器人轴,以便进行校准。
注:机器人外轴运动必须为单轴运动; 为了更精确校准,可使用微动控制。
重定位运动姿态运动:
机器人TCP位置不变,机器人工具沿坐标轴转动,改变姿态。
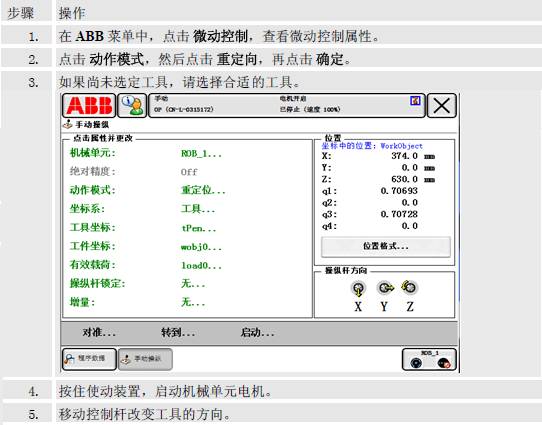
注:重定位运动时,必须先选择工具坐标。
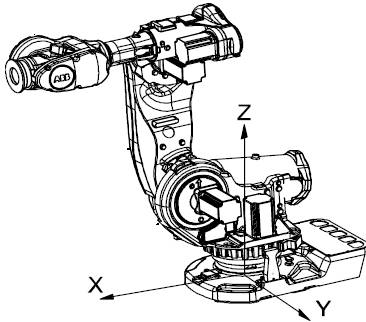
线性运动基坐标
何时使用:
当需要将可预测的运动轻而易举地转化为控制杆运动时,可以在基坐标系中进行微动控制。在许多情况下,基坐标系是使用*为方便的一种坐标系,因为它对工具、工件或其它机械单元没有依赖性。
操作步骤
(1)在ABB菜单中,点击微动控制,查看微动控制属性;
(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤;
(4)按住使动装置,启动操纵器电机;
(5)移动控制杆,机械单元将随之移动;
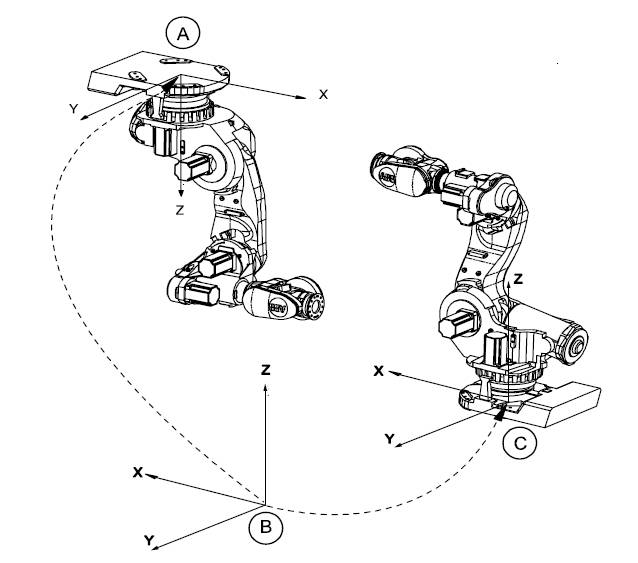
线性运动大地坐标
何时使用:
例如:有两个机器人,一个安装于地面,一个倒置。代表机器人的基坐标系也将上下颠倒。如果在倒置机器人的基坐标系中进行微动控制,则很难预测移动情况。此时可选择共享大地坐标系。
操作步骤
(1)在ABB菜单中,点击微动控制,查看微动控制属性。
(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。
(4)按住使动装置,启动操纵器电机。
(5)移动控制杆,机械单元将随之移动。
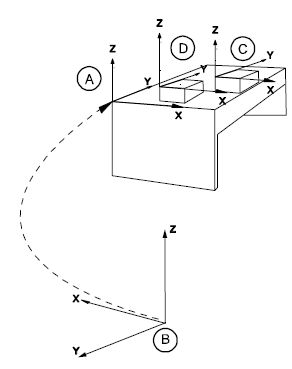
线性运动工件坐标
何时使用:
例如:工厂打算确定一系列孔的位置,以便沿着工件边缘钻孔。工厂打算在工件箱的两面隔板之间焊接。
操作步骤
(1)在ABB菜单中,点击微动控制,查看微动控制属性。
(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。
(3)点击工件以选择工件。
(4)点击工具以选择工具。
(5)点击有效载荷以选择有效载荷
(7)按住使动装置,启动操纵器电机。
(8)移动控制杆,机械单元将随之移动。
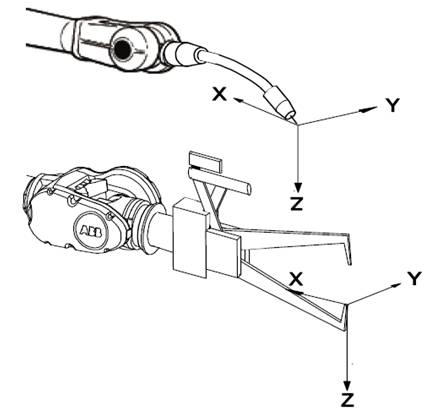
线性运动工具坐标
何时使用:
使用工具体系对穿、钻、铣、锯等进行编程和调整
操作步骤
(1)在ABB菜单中,点击微动控制,查看微动控制属性。
(2)点击动作模式,然后点击线性,再点击确定,如果之前已选择线性动作,则无需执行此步骤。
(3)选择合适的工具。
(5)按住使动装置,启动机械单元电机。
(6)移动控制杆,机械单元将随之移动。
