18964551752
上海市宝山区富联一路98号6栋
二维码
工博士官方客服微信
联系方式
电话:18964551752
服务时间 8:30~18:00
返回首页
回到顶部
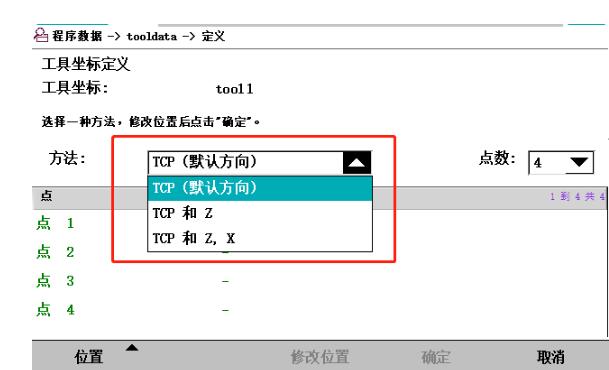
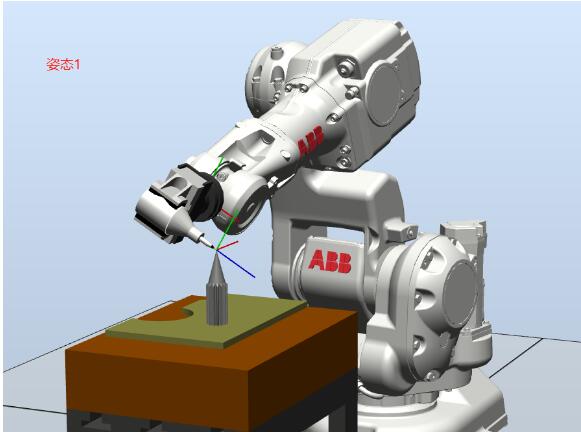
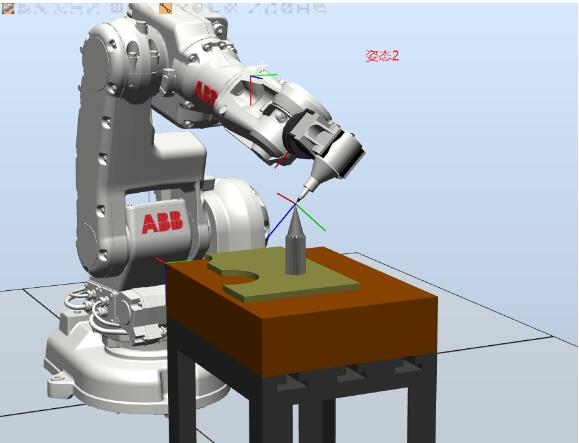
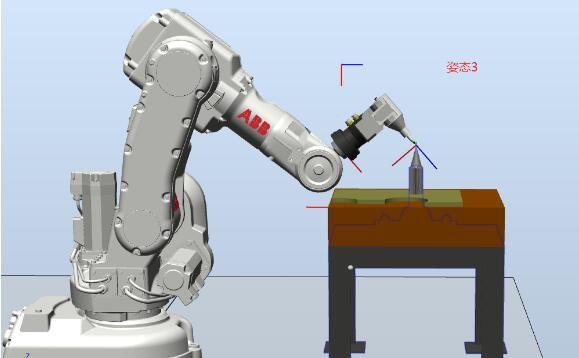
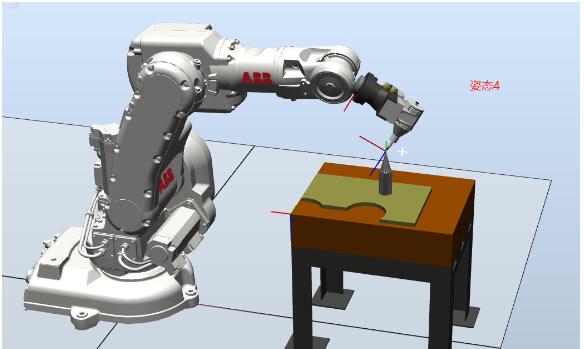
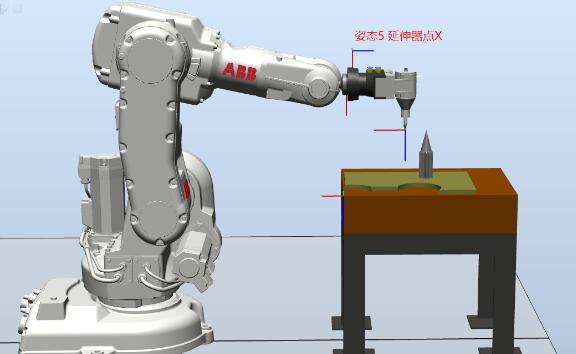
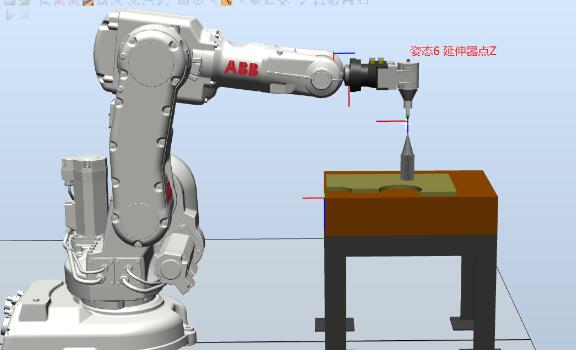
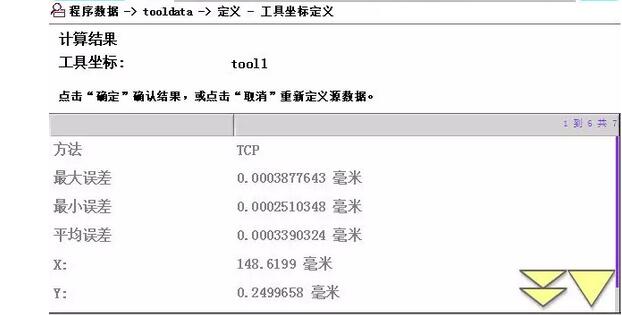
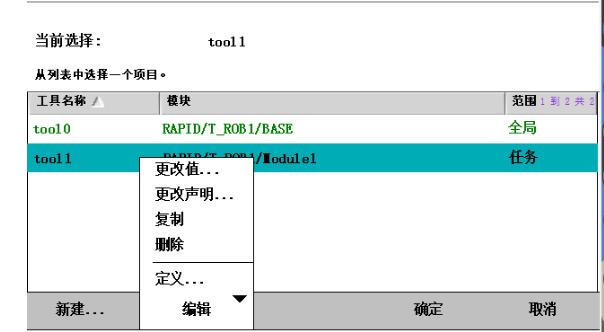
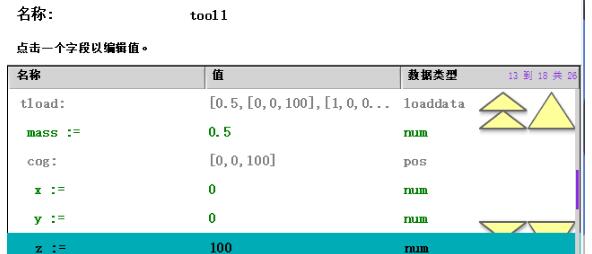
ABB机器人的工具坐标系如何设定!!!
2020-07-10 10:02:39