ABB 机器人的手动操作3 重定位运动的手动操纵
机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴旋转的运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动。以下就是手动操纵重定位运动的方法。
第一步 选择"手动操纵"

第二步 单击"动作模式"。
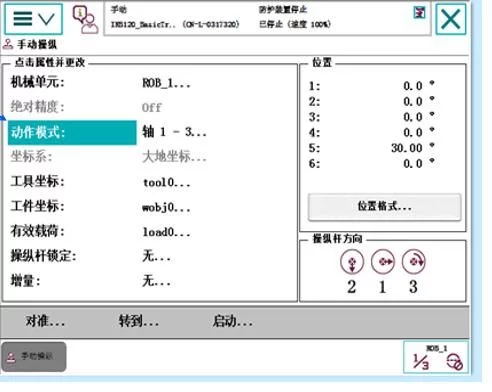
第三步 选择"重定位",然后单击"确定"。

第四步 单击"坐标系"。
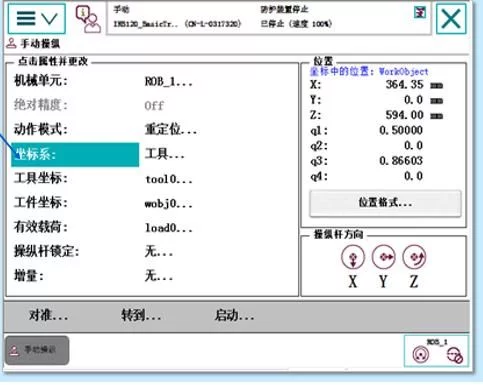
第五步 选择"工具",然后单击"确定"。

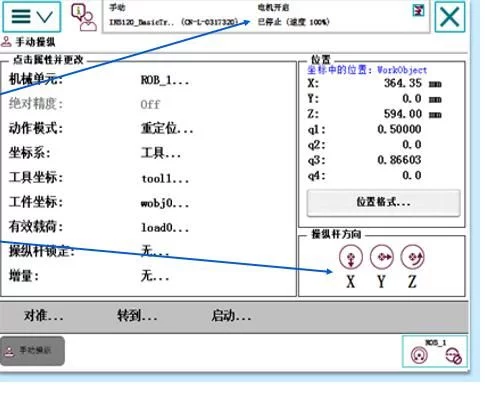
第六步 单击"工具坐标"

第七步 选中对应的工具"tool1",然后单击"确定

第八步 用左手按下使能按钮,进入"电机开启"状态

第九步 .在状态中,确认"电机开启"状态 显示轴X、Y、Z的操纵杆方向。箭头代表正方向。
第十步 操作示教器上的操纵杆,机器人绕着工具TCP点作姿态调整的运动。
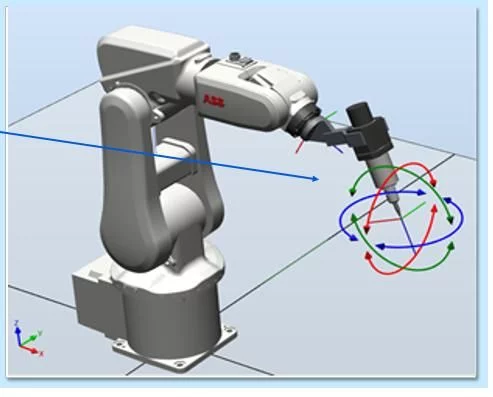
以上就是重定位的手动操作方法。

