二维码

工博士官方客服微信
联系方式
联系方式
电话:18964551752
服务时间 8:30~18:00
返回首页
回到顶部
分享ABB机器人编程技巧
2018-05-09 16:42:19
第一:拖入YuMi,导入抓手并安装到机器人,并创建系统

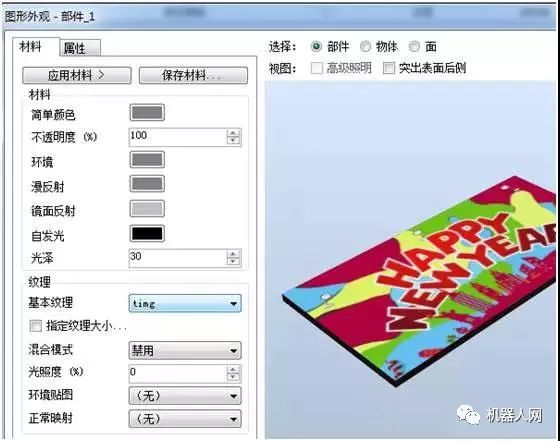
第二:创建一个矩形体,举例400*200*10,并右击修改-图形显示,基本文理导入图片
第三:调整矩形体位置并安装到机器人左手上,出现是否修改位置,选择“否”

第四:激活右手机器人,并创建坐标系,坐标系由左手驱动

第五:记录当前右手机器人在左手坐标系下的点,并创建语句moveL

第六:激活左手,记录多个运动语句并创建

第七:把路径同步到机器人rapid
第八:此处需要使用机器人同步。YuMi在创建系统时自动加入了604-1同步协调选项
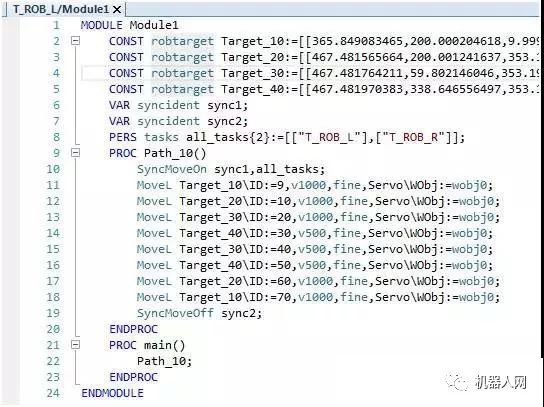
第九:左手机器人代码如下
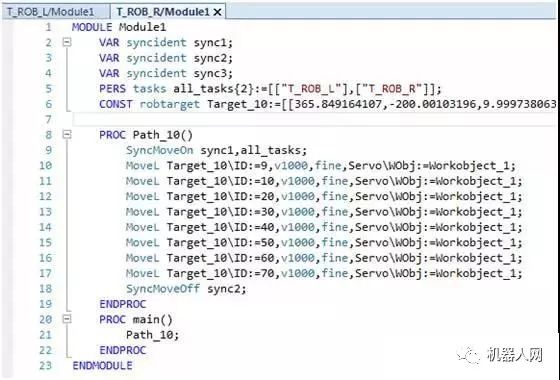
第十:右手机器人代码如下

2、4台机器人协同运动
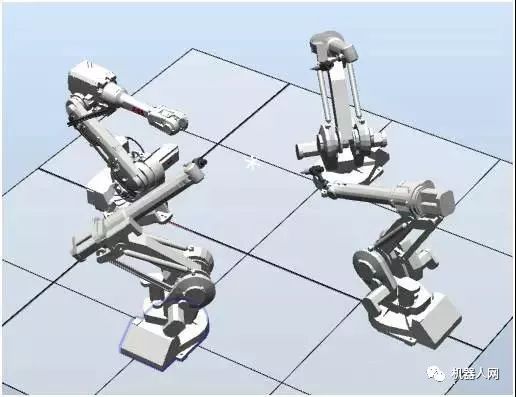
第一:导入4台1410机器人并调整布局
第二:导入三个工具并安装到3台机器人上
第三:制作产品工件,并安装到机器人1上

第四:从布局创建系统,其中第一台机器人持有工件
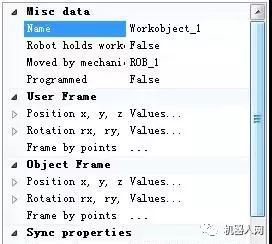
第五:激活T_ROB2,即在第二台机器人下,在1号机器人持有的工件下做工件坐标系,其中,坐标系由ROB_1驱动
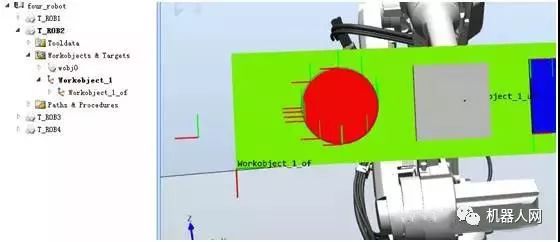
第六:2号机器人在这个坐标系完成轨迹。
第七:同理完成3号和4号机器人轨迹
第八:点击multimove按钮

第九:设定完起始位置后,点击Play,系统自动计算4台机器人轨迹

第十:计算成功后,会得到MMPath1,同步到RAPID
第十一:测试运行
