二维码

工博士官方客服微信
联系方式
联系方式
电话:18964551752
服务时间 8:30~18:00
返回首页
回到顶部
ABB机器人如何创建码垛
2018-05-28 21:03:17
2)如何简便码垛程序
设置好工件坐标系,工具,对第一个码垛放置点进行示教,xyz方向的间距和个数可设
3)如何创建
创建m_pallet模块
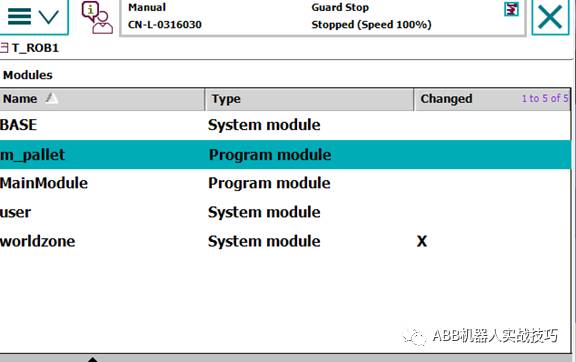
建立两个routine
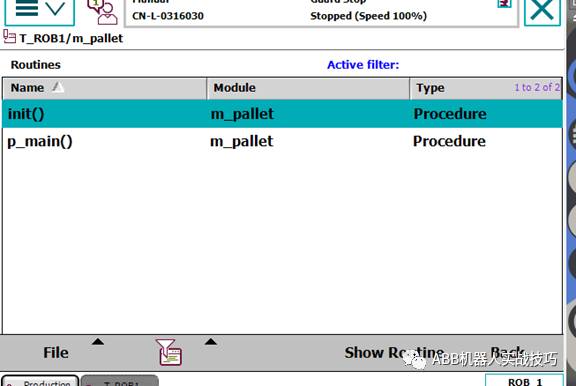
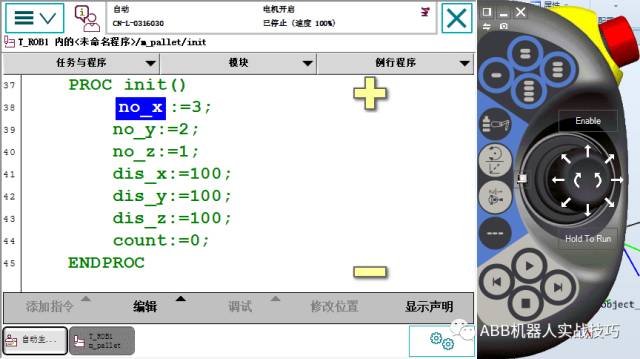
在init 程序里,设置xyz方向个数和各方向间距
在p_main程序里,创建机器人移动到pHome点,pPick位置(抓取位置),以及第一个放置点pPlace_ini
通过三层for循环,进行码垛。实例程序为先x方向,再y方向,再z方向
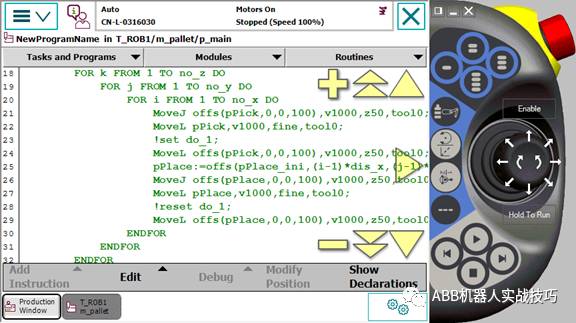
其中偏移如下:
pPlace:=offs(pPlace_ini,(i-1)*dis_x,(j-1)*dis_y,(k-1)*dis_z);
