机器人系统 这一概念涉及操纵器、控制器以及控制器控制的所有设备 (工具和传感器等)。它包括操作机器人所需的所有硬件和软件。该术语不包括特殊应用的软件和硬件,例如点焊设备等。
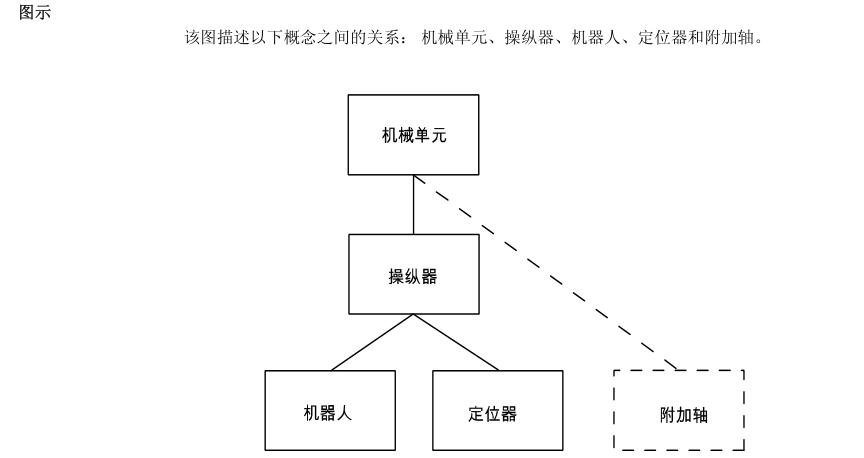
机械单元:机械单元可被进行微动控制。机械单元可以是 1 个机器人,1 根
附加轴(如 1 个电机)或 1 组附加轴,如 1 个双轴定位器或 1 个非 ABB 机器人。
操纵器: 操纵器 是用来移动工件、工具等的机械单元的总称。 操纵器 这一
术语包括机器人和定位器。
机器人:机器人 是带 TCP 的机械单元。机器人可经设定移至 TCP 的笛卡尔
坐标(x、y 和 z)中的指定位置,方向与工具方向一致。
定位器:定位器 是用于移动工件的机械单元。它有 1 根或若干轴,但通常不
超过 3 根。定位器通常没有 TCP。
附加轴:机器人控制器可以控制除机器人轴以外的附加轴。 这些机械单元可
以经过微动控制,与机器人的运动协调。