ABB机器人IRB140
1)规格:
|
型号 |
第5轴工作范围 |
有效荷重 |
重复定位精度 |
注释 |
|
IRB140/IRB140T |
810 mm |
6 kg |
0.03 mm(ISO试验平均值) |
|
|
IRB140F/IRB140TF |
810 mm |
6 kg |
0.03 mm(ISO试验平均值) |
铸造专家型防护 |
|
IRB140CR |
|
|
|
|
|
IRB140TCR |
810 mm |
6 kg |
0.03 mm(ISO试验平均值) |
洁净室型 |
|
IRB140W |
|
|
|
|
|
IRB140TW
|
810 mm |
6 kg |
0.03 mm(ISO试验平均值) |
可冲洗型防护 |
2)介绍:
小、快、强六轴机器人,外形紧凑、功能强劲的IRB 140是一款六轴多用途工业机 器人,有效荷重6 kg,工作范围长达 810mm,可选落地 安装、倒置安装或任意角度挂壁安装方式,IRB 140分标准型、铸造专家型、洁净室型、可冲洗型4种机型,所有 机械臂均全面达到IP67防护等级,易于同各类工艺应用相 集成与融合。
IRB 140设计紧凑、牢靠,采用集成式线缆包,进一步提高了整体柔性。可选配碰撞检测功能(实现全路径回退),使可靠性和安全性更有保障。
3)具体参数
轴数:6
荷重:6kg
工作范围:810mm
重复定位精度:0.03mm
版本:通用版、洁净版、铸造版、清洗版
防护等级标配:IP67
防护等级选配:洁净室6级、铸造专家
安装方式:地面、壁挂、倒置、任意角度
本体重量:98 kg
主要应用:弧焊、装配、切割/去毛刺、机械管理、物料搬运、包装、去毛刺
4)工业机器人IRB 140 技术数据:
附加荷重(上臂或手腕)
上臂 1 kg
手腕 0.5kg
集成信号源 上臂12路信号
集成气源 上臂*高8bar
轴动作 :
轴 工作范围 IRB140速度 IRB140T速度
1轴 C旋转 360° 200º/s 250º/s
2轴 B手臂 360° 200º/s 250º/s
3轴 A手臂 280° 260º/s 260º/s
4轴 D手腕 无限制(默认400°) 360º/s 360º/s
5轴 E弯曲 240° 360º/s 360º/s
6轴 P翻转 无限制(默认800° 450º/s 450º/s
TCP*大速度 2.5m/s
TCP*大加速度 20m/s2
加速时间0-1m/s 0.15s
5)节拍时间:
|
5KG拾料侧 |
IRB140 |
IRB140T |
|
节拍25×300×25mm |
0.85s |
0.77s |
6)电气连接:
电源电压 200-600 V,50/60 Hz
额定功率
变压器额定功率 4.5 kVA
功耗 0.4 kW
7)物理特性:
机器人安装 任意角度
尺寸
机器人底座 400×450 mm
机器人控制器(高×宽×深) 950 ×800×620mm
机器人本体重量 98KG
8)机械手环境温度:
运行中 +5°C(41°F)至 +45°C(122°F)
运输与储存时 -25°C(-13°F)至 +55°C(131°F)
短期 *高+70°C(158°F)
相对湿度 *高95%
选件 铸造型 可冲洗型(耐高压蒸汽清洗)洁净室型, 6级
(IPA认证)**
噪音水平 70dB (A)
安全性 安全停、紧急停
2通道安全回路监测
3位启动装置
辐射 EMC/EMI屏蔽
数据和尺寸若有变更,恕不另行通知,更多详情联系186-1655-5596!
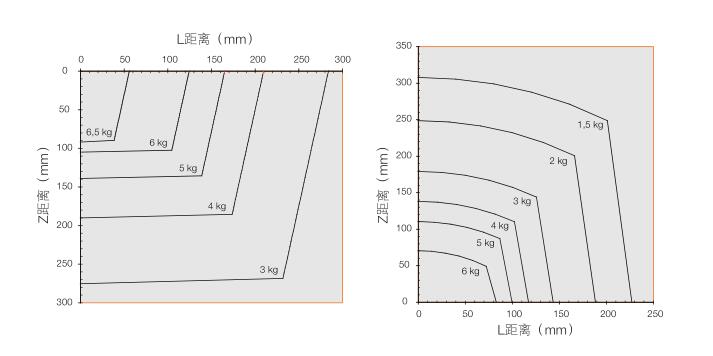
9)工作范围与荷重图: